Cómo funcionan por dentro
Dentro de un motor paso a paso hay dos piezas clave:
- El estátor: la parte fija, con varias bobinas (electroimanes) repartidas alrededor
- El rotor: la parte que gira, que es un imán
Cuando haces pasar corriente por una bobina, esta se convierte en un imán y atrae al rotor, que se alinea con ella. Si vas activando las bobinas en orden, el rotor va "persiguiendo" al campo magnético y gira un paso cada vez. Si activas las bobinas en orden inverso, gira al revés.
Así de simple: encender bobinas en secuencia = movimiento controlado, paso a paso.
El driver hace el trabajo sucio
Tú no activas las bobinas a mano. De eso se encarga el driver (por ejemplo el A4988): tú solo le das dos señales y él se ocupa de energizar las bobinas en el orden correcto.
- STEP: cada pulso que recibe = un paso (o micropaso)
- DIR: el nivel de esta señal (alto o bajo) decide el sentido de giro
Esto lo verás en la práctica en cómo se conectan y en el código básico.
Pasos por vuelta
Como vimos, un motor típico de 1.8° necesita 200 pasos para dar una vuelta completa:
360° / 1.8° = 200 pasos por vuelta
Microstepping (micropasos)
Aquí viene una de las partes más importantes. El driver puede dividir cada paso en fracciones más pequeñas: medios pasos, cuartos, octavos, dieciseisavos... Esto se llama microstepping.
En vez de saltar de golpe de un paso al siguiente, el driver ajusta la corriente de las bobinas de forma gradual para dejar el rotor en posiciones intermedias.
¿Para qué sirve?
- Movimiento más suave: el motor no da "tirones", se desliza
- Menos ruido y vibración
- Más resolución: puedes posicionar el eje con mucho más detalle
Un ejemplo
Con un A4988 configurado a 1/16 de paso, cada paso completo se divide en 16:
200 pasos × 16 micropasos = 3200 micropasos por vuelta
Pasas de 200 a 3200 posiciones por vuelta. Muchísima más finura.
El compromiso
El microstepping no es gratis. Cuanto más lo subes:
- Más suavidad y resolución (bueno)
- Menos par por micropaso (el motor "empuja" con menos fuerza en cada micropaso)
Por eso no siempre se usa el máximo. Un valor de 1/16 es un equilibrio muy habitual para impresoras 3D, CNC y plotters.
Cómo se configura en el A4988
El microstepping se elige con tres pines del driver — MS1, MS2 y MS3 — que en una CNC Shield son los jumpers M0, M1 y M2 que hay debajo de cada driver. Según cuáles pongas, obtienes una resolución distinta:
| MS1 (M0) | MS2 (M1) | MS3 (M2) | Resolución | Pasos por vuelta |
|---|---|---|---|---|
| ○ | ○ | ○ | Paso completo | 200 |
| ● | ○ | ○ | 1/2 paso | 400 |
| ○ | ● | ○ | 1/4 paso | 800 |
| ● | ● | ○ | 1/8 paso | 1600 |
| ● | ● | ● | 1/16 paso | 3200 |
● = jumper puesto · ○ = sin jumper
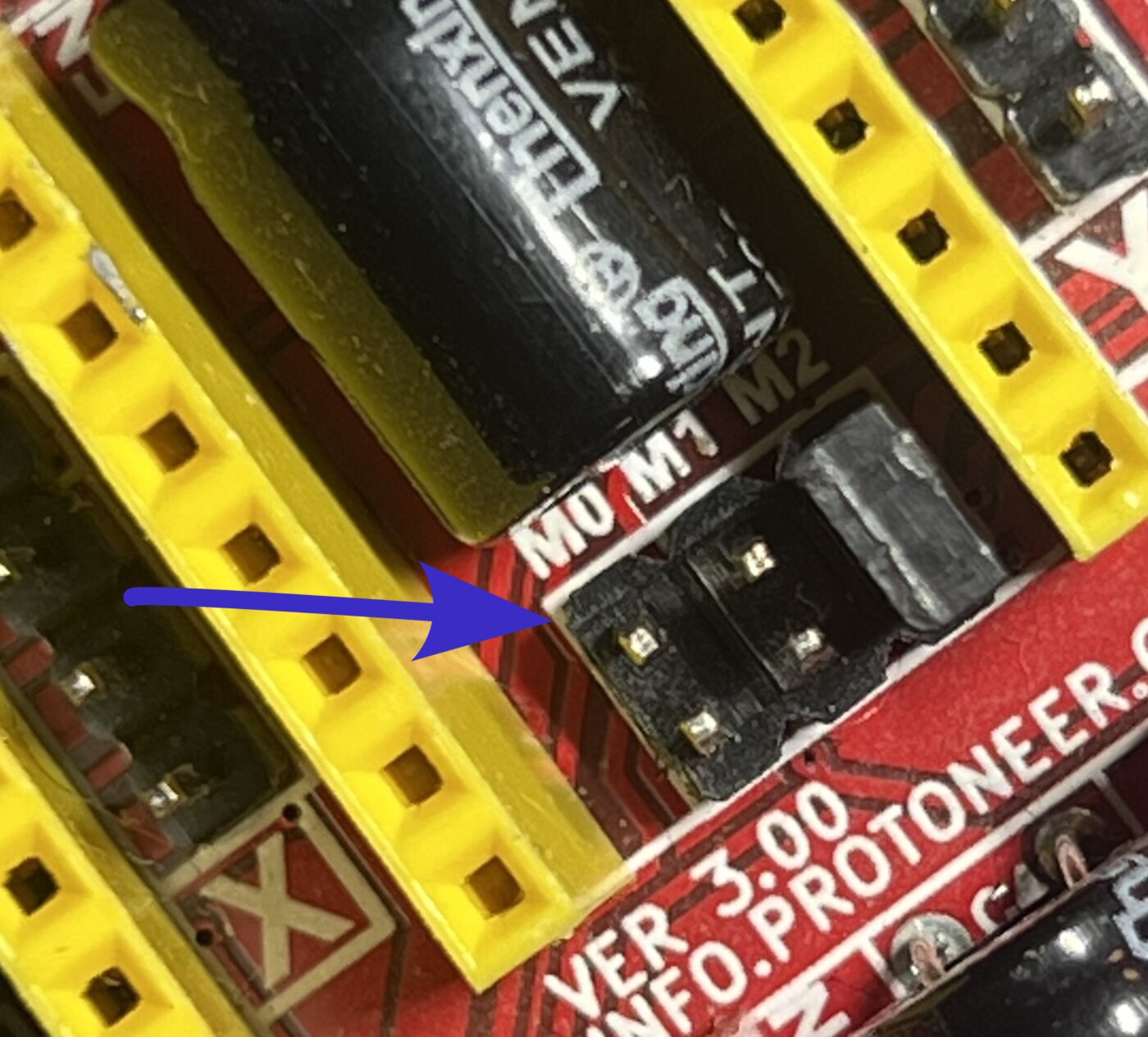
En la práctica, el microstepping se elige con esos jumpers debajo de cada driver. Lo ves aplicado en el montaje del Plotter.
El par y la pérdida de pasos
Los motores paso a paso tienen mucha fuerza (par) a baja velocidad, que es justo lo que se necesita para mover ejes con precisión. Pero a medida que giran más rápido, pierden par.
Si les pides más velocidad o más carga de la que pueden, ocurre lo peor: pierden pasos. El motor se salta posiciones, pero el driver sigue contando como si nada, así que pierdes la referencia de dónde está el eje. En un plotter esto se traduce en un dibujo torcido o descuadrado.
La solución es no exigirles de más: velocidades y aceleraciones razonables, y la corriente bien ajustada (el Vref en el caso del plotter).